Lec 13: Ray Tracing 1¶
光栅化的局限性¶

如图,假如使用光栅化实现上面的三个效果,实际上都不太好。
为什么使用光线追踪?¶
我们可以认为:
- 光栅化就是一种快速但是低质量(i.e. 很近似)的渲染技术。
- 光线追踪是一种很慢但是非常逼真的渲染方法
因此,
- 光栅化一般用于实时渲染,如游戏
- 光线追踪一般用于离线制作,如电影
- 后者往往要用到上万 CPU hours 去渲染 one frame
光线追踪基础¶
三个假设¶
- 光线沿直线传播
- 光线互不相干
- 光路可逆
Whitted-Style Ray Tracing¶
基本原理:
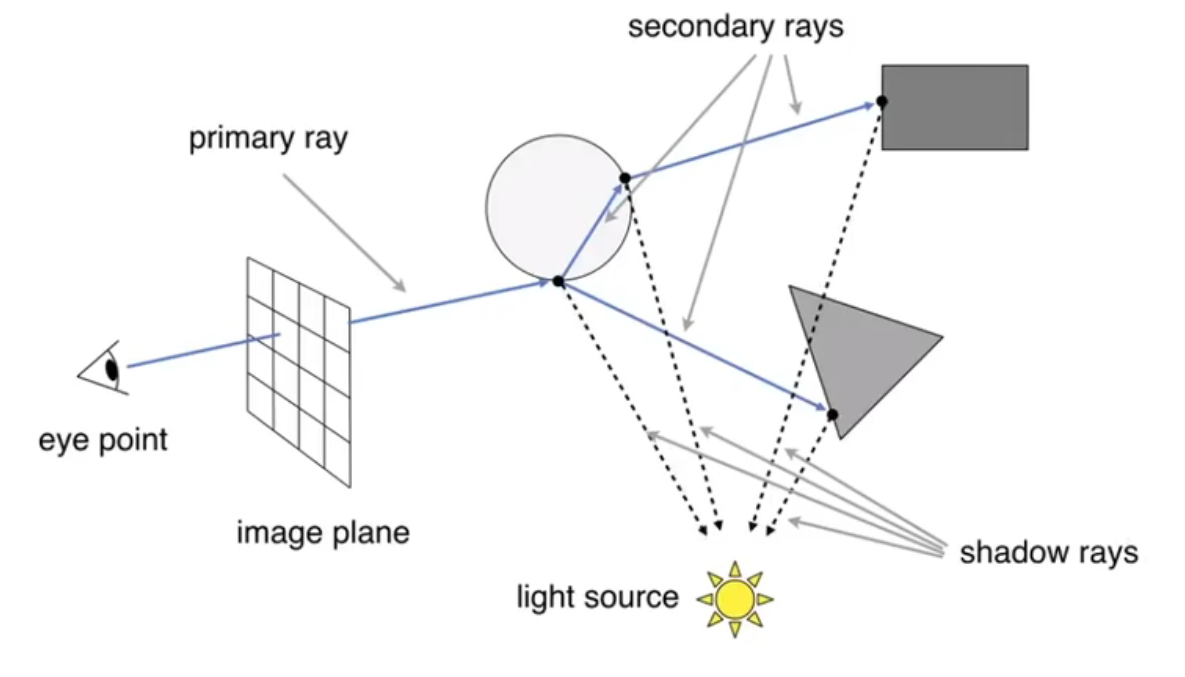
如图,利用光路可逆的原理,我们从眼睛出发,并不断在物体上进行反射和折射。
我们将反射和折射的点(也就是图中所有的 rays 的终点)利用 Blinn-Phong 模型算出光照强度,并加权(根据折射/反射的次数算出能量损失)求和,得到 primary ray 的终点处的总强度。然后进行渲染。
几何体求交¶
假设光线从 \(\mathbf O\) 处,以方向 \(\mathbf D\) 发射出去,则光线的方程为:
$$
\mathbf{r}(t) = \mathbf{o} + t\mathbf{d}, \quad 0 \leq t < \infty
$$
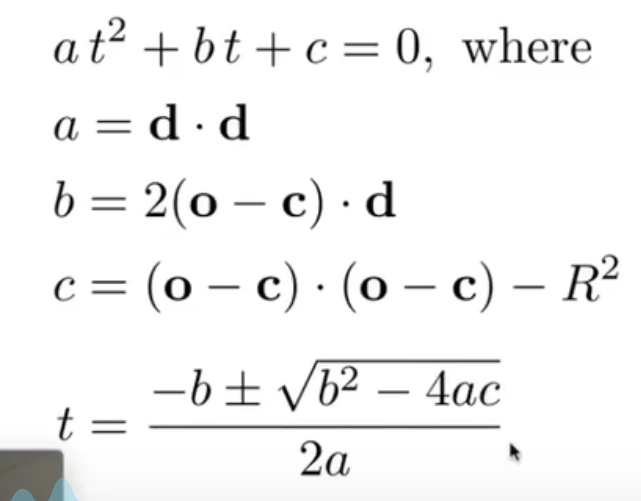
与圆 \((\mathbf c, R)\)求交:
$$
(\mathbf o + t \mathbf d - \mathbf c)^2 = R^2
$$
与三角形求交时,我们先求出三角形所在平面 \((\mathbf n, \mathbf p)\),其中,\(\mathbf n\) 是法向量,\(\mathbf p\) 是平面上一点。再求出光线与平面的交点。最后判断交点是否在三角形内部。
或者也可以用 Moller Trumbore 算法,使用三角形重心坐标,一步到位:
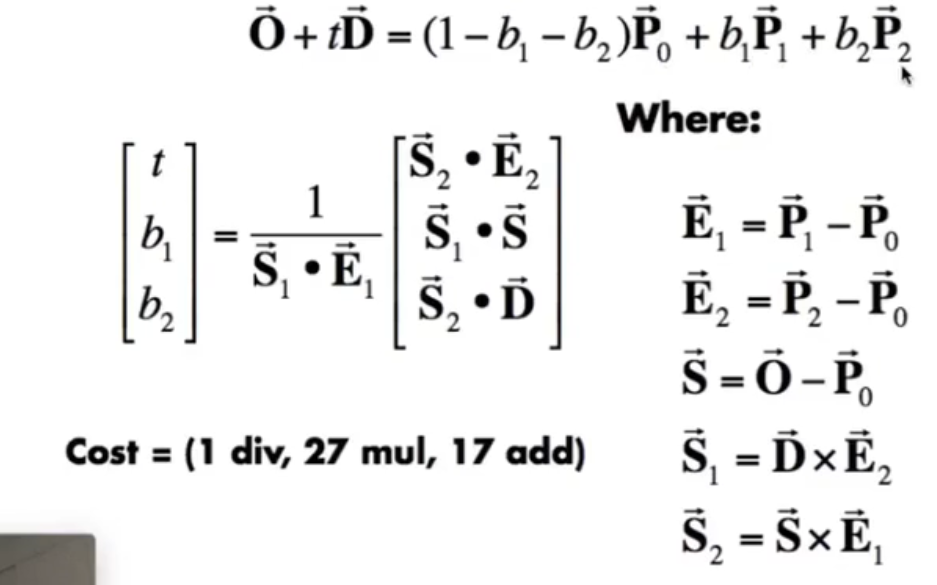
具体推导:方程可以简化为 $$ \begin{aligned} \mathbf D t + (\mathbf P_0 - \mathbf P_1) b_1 + (\mathbf P_0 - \mathbf P_2)b_2 = \mathbf P_0 - \mathbf O \ \begin{bmatrix} \mathbf D & -\mathbf E_1 & -\mathbf E_2 \end{bmatrix} \begin{bmatrix} t \ b_1 \ b_2 \end{bmatrix} = -\mathbf S \end{aligned} $$
通过 Cramer 法则,就可以得到最终的结果。
- Note:\(\det \begin{bmatrix} \mathbf A & \mathbf B & \mathbf C \end{bmatrix} = (\mathbf A \times \mathbf B) \cdot \mathbf C\)
我们只需要判断是否有 \(t \geq 0\) 且 \(b_1, b_2 \in \left[0,1\right]\) 即可。
相交检测:Bounding Volume¶
对于观察者而言,如果对于每一个像素,我们追踪的光线都要和场景内所有的三角形进行相交检测,那么,总共的检测数量就是 # of pixels * # of meshes (* # of bounces,i.e. 光的反射次数 + 1)。
- 对于 # of meshes 数量庞大的情况,这是不可接受的
Bounding Volume(包围体积)¶
使用简单的形状包围物体。检测光线碰撞时,如果光线没有和包围体积发生碰撞,则不可能和内部的 meshes 发生碰撞。从而简化大量不必要的计算。

光线碰撞计算¶
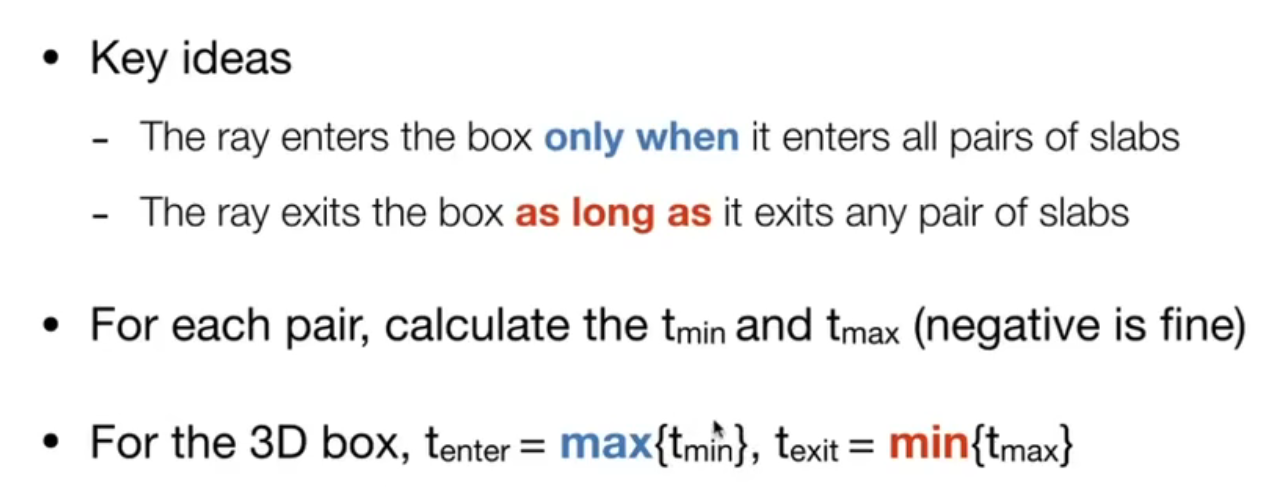
对于包围体积的三对面,我们分别计算其进入时间和离开时间(不考虑进入和离开的位置)。以 2D 为例,如图:
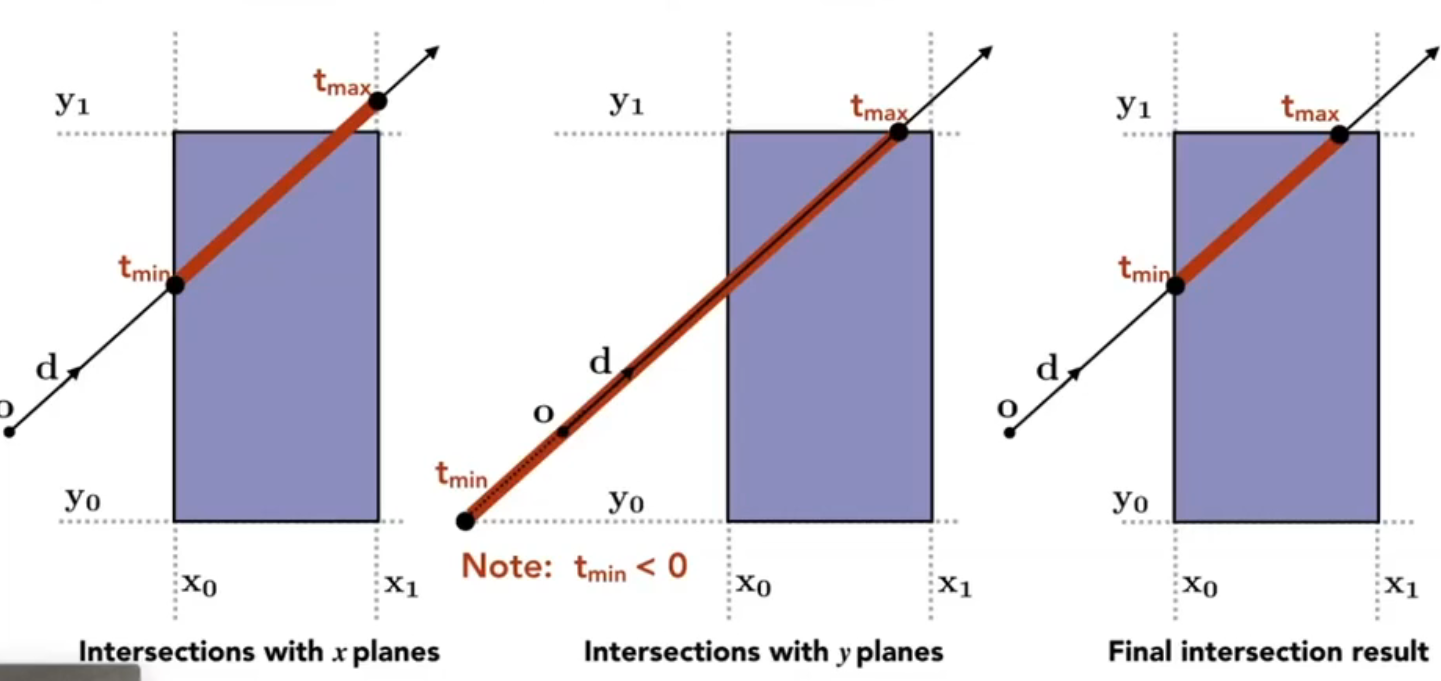
Generally speaking,
若:
- \(t_{exit} < t_{enter}\),则显然不对,实际上无交点
- \((t_{enter}<)t_{exit} < 0\),则物体在光线背后相交,不成立
- \(t_{enter}<0\leq t_{exit}\),则光线本身从物体内部发出来,可行
因此,我们光线碰撞的充要条件:\(t_{enter}<t_{exit}\) 且 \(t_{exit} \geq 0\)
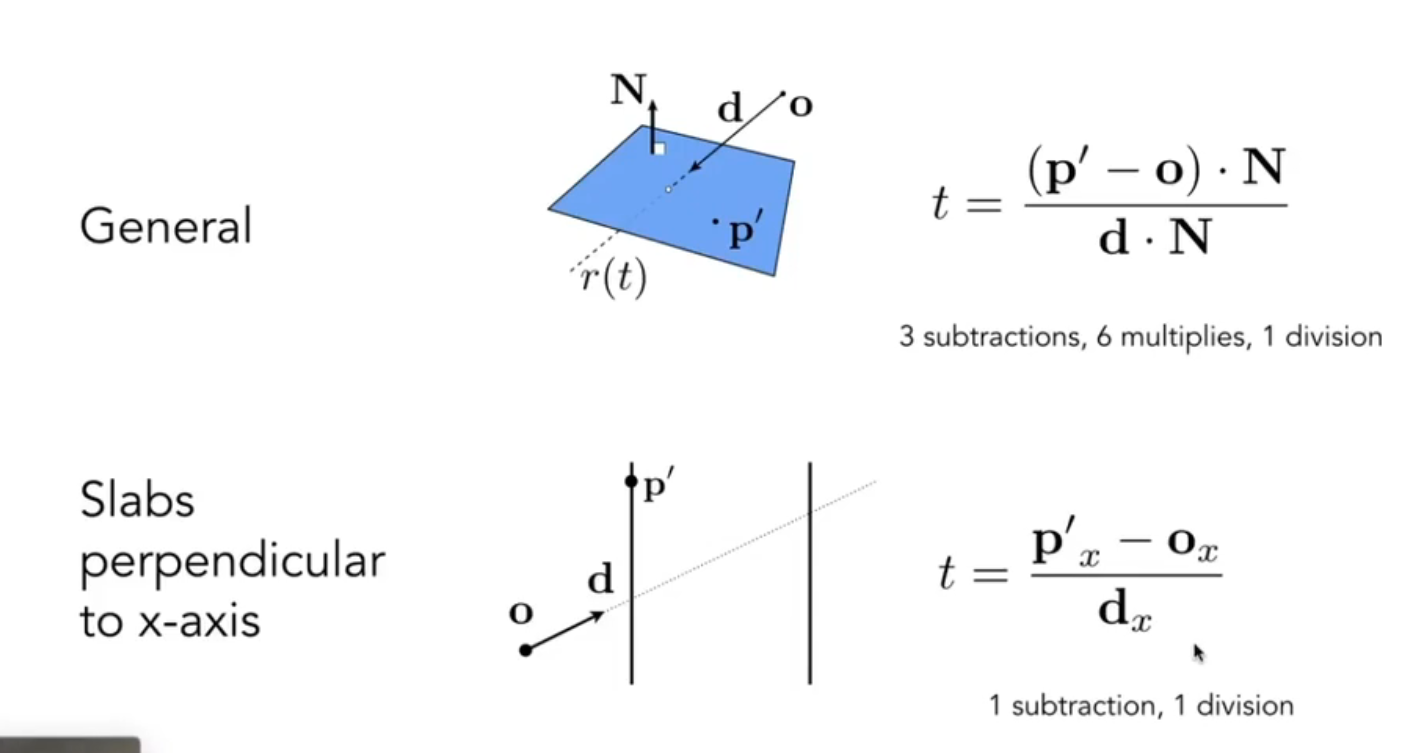
Why AABB (Axis-Aligned Bounding Box)?¶
使用 Axis-Aligned 的方法,可以简化 \(t\) 的计算,如下图所示: